Project: System Integration
Integration of the perception, planning, and control subsystems of an autonomous vehicle using the Robot Operating System (ROS)

Project: PID Controller
Lateral trajectory control using a PID controller to regulate the steering angle
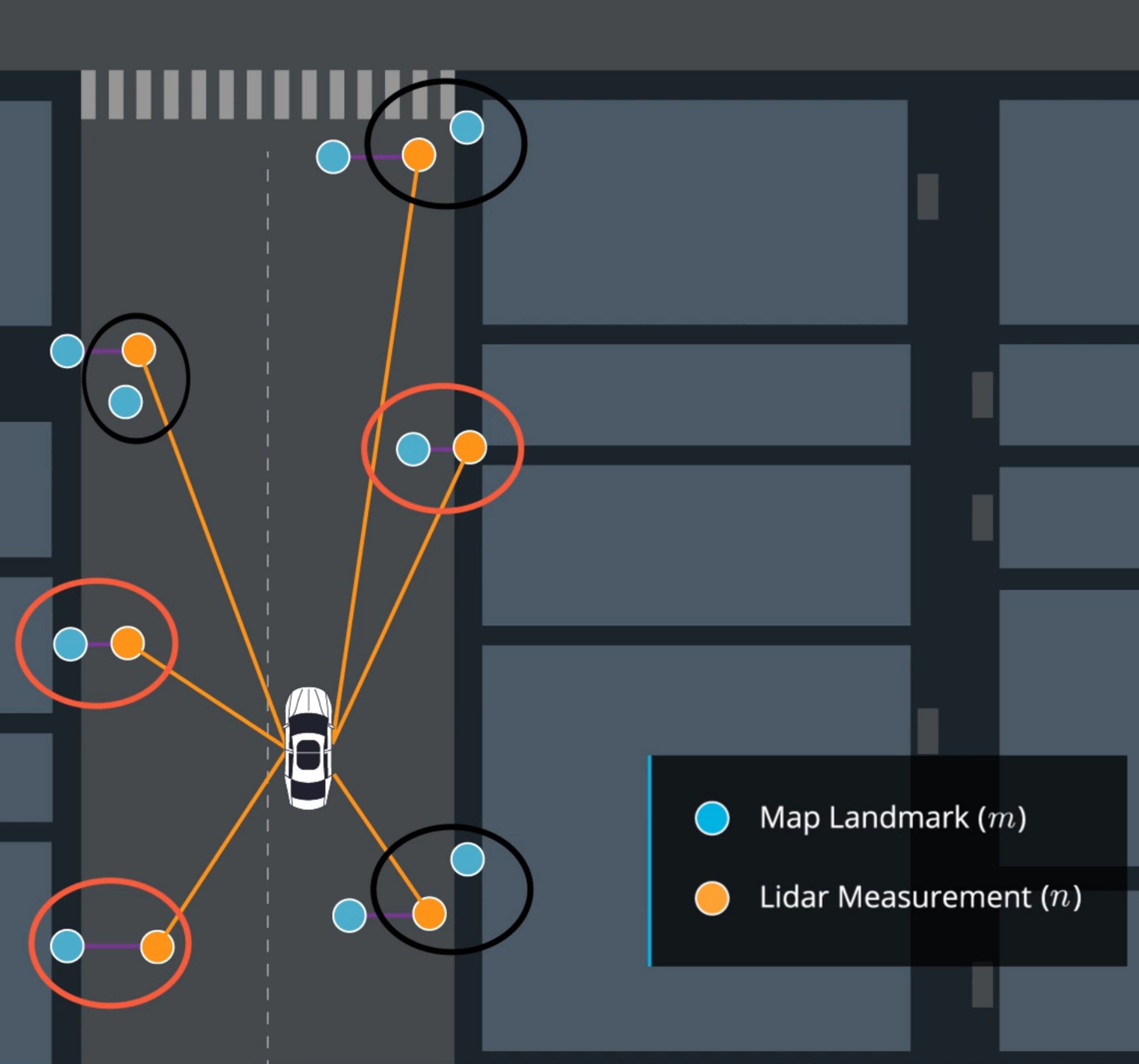
Project: Particle Filter
Tracking the location and heading of a vehicle using a two-dimensional particle filter
Project: Extended Kalman Filter
Tracking an objects state based on knowledge of its system dynamics and the availability of noisy measurements
Project: Behavioral Cloning
Cloning human driving behaviour by end-to-end deep learning with a CNN implemented in Keras

Project: Traffic Sign Classifier
Traffic sign classification with a convolutional neural network build in tensorflow